момент инерции сечения - это сумма всех элементарно малых площадей dF, составляющих это сечение, умноженных на квадрат расстояния от этих площадей до выбранной оси:
I = ∑ri2dFi =∫r2dF (1.1)
В принципе и определение и формула, его описывающая, не сложные и запомнить их намного легче, чем вникнуть в суть. Но все-таки попробуем разобраться, что же такое момент инерции и откуда он взялся.
Понятие момент инерции пришло в сопромат и строительную механику из другого раздела физики, изучающего кинематику движения, в частности вращательное движение. Но все равно начнем издалека.
Я точно не знаю, упало ли Исааку Ньютону на голову яблоко, упало оно рядом, или вообще не падало, теория вероятности допускает все эти варианты (к тому же в этом яблоке слишком много от библейской легенды о древе познания), однако я уверен, что Ньютон был наблюдательным человеком, способным делать выводы из своих наблюдений. Так наблюдательность и воображение позволили Ньютону сформулировать основной закон динамики (второй закон Ньютона), согласно которому масса тела m, умноженная на ускорение a, равна действующей силе Q (вообще-то более привычным для силы является обозначение F, но так как дальше мы будем иметь дело с площадью, которая также часто обозначается как F, то я использую для внешней силы, рассматриваемой в теоретической механике как сосредоточенная нагрузка, обозначение Q, сути дела это не меняет):
Q = ma (1.2)
По мне величие Ньютона именно в простоте и понятности данного определения. А еще, если учесть, что при равноускоренном движении ускорение а равно отношению приращения скорости ΔV к периоду времени Δt, за который скорость изменилась:
a = Δv/Δt = (v - vо)/t (1.3.1)
при Vо = 0 a = v/t (1.3.2)
то можно определить основные параметры движения, такие как расстояние, скорость, время и даже импульс р, характеризующий количество движения:
p = mv (1.4)
Например, яблоко, падающее с разной высоты под действием только силы тяжести, будет падать до земли разное время, иметь разную скорость в момент приземления и соответственно разный импульс. Другими словами, яблоко, падающее с бóльшей высоты, будет дольше лететь и сильнее треснет по лбу незадачливого наблюдателя. И все это Ньютон свел к простой и понятной формуле.
А еще Ньютон сформулировал закон инерции (первый закон Ньютона): если ускорение а = 0, то в инерциальной системе отсчета невозможно определить, находится ли наблюдаемое тело, на которое не действуют внешние силы, в состоянии покоя или движется прямолинейно с постоянной скоростью. Это свойство материальных тел сохранять свою скорость, пусть даже и нулевую, называется инертностью. Мерой инертности является инерционная масса тела. Иногда инерционная масса называется инертной, но сути дела это не меняет. Считается, что инерционная масса равна гравитационной массе и потому часто не уточняется, какая именно масса имеется в виду, а упоминается просто масса тела.
Не менее важным и значимым является и третий закон Ньютона, согласно которому сила действия равна силе противодействия, если силы направлены по одной прямой, но при этом в противоположные стороны. Не смотря, на кажущуюся простоту, и этот вывод Ньютона гениален и значение этого закона трудно переоценить. Об одном из применений этого закона чуть ниже.
Однако данные положения справедливы только для тел, движущихся поступательно, т.е. по прямолинейной траектории и при этом все материальные точки таких тел двигаются с одинаковой скоростью или одинаковым ускорением. При криволинейном движении и в частности при вращательном движении, например, когда тело вращается вокруг своей оси симметрии, материальные точки такого тела перемещаются в пространстве с одинаковой угловой скоростью w, но при этом линейная скорость v у различных точек будет разная и эта линейная скорость прямо пропорциональна расстоянию r от оси вращения до этой точки:
v = wr (1.5)
при этом угловая скорость равна отношению приращения угла поворота Δφ к периоду времени Δt, за который угол поворота изменился:
w = Δφ/Δt = (φ - φо)/t (1.6.1)
при φо = 0 w = φ/t (1.7.2)
соответственно нормальное ускорение аn при вращательном движении равно:
an = v2/r = w2r (1.8)
И получается, что для вращательного движения мы не можем прямо использовать формулу (1.2), так как при вращательном движении одного только значения массы тела недостаточно, требуется еще знать распределение этой массы в теле. Получается, что чем ближе материальные точки тела к оси вращения, тем меньшую силу требуется приложить, чтобы заставить тело вращаться и наоборот, чем дальше материальные точки тела от оси вращения, тем большую силу нужно приложить, чтобы заставить тело вращаться (в данном случае речь идет о приложении силы в одной и той же точке). К тому же при вращении тела более удобно рассматривать не действующую силу, а вращающий момент, так как при вращательном движении точка приложения силы также имеет большое значение.
Поразительные свойства момента нам известны со времен Архимеда и если применить понятие момента к вращательному движению, то значение момента М будет тем больше, чем больше расстояние r от оси вращения до точки приложения силы F (в строительной механике внешняя сила часто обозначается как Р или Q):
М = Qr (1.9)
Из этой также не очень сложной формулы выходит, что если сила будет приложена по оси вращения, то никакого вращения не будет, так как r = 0, а если сила будет приложена на максимальном удалении от оси вращения, то и значение момента будет максимальным. А если мы подставим в формулу (1.9) значение силы из формулы (1.2) и значение нормального ускорения и формулы (1.8), то получим следующее уравнение:
М = mw2r·r = mw2r2 (1.10)
В частном случае когда тело является материальной точкой, имеющей размеры намного меньше, чем расстояние от этой точки до оси вращения, уравнение (1.10) применимо в чистом виде. Однако для тела, вращающегося вокруг одной из своих осей симметрии, расстояние от каждой материальной точки составляющей данное тело, всегда меньше одного из геометрических размеров тела и потому распределение массы тела имеет большое значение, в этом случае требуется учесть эти расстояния отдельно для каждой точки:
M = ∑ri2w2mi (1.11.1)
Мс= w2∫r2dm (1.11.2) - при вращении тела вокруг оси симметрии
И тогда получается, что согласно третьему закону Ньютона в ответ на действие вращающего момента будет возникать так называемый момент инерции I. При этом значения вращающего момента и момента инерции будут равны, а сами моменты направлены в противоположные стороны. При постоянной угловой скорости вращения, например w = 1, основными величинами, характеризующими вращающий момент или момент инерции будут масса материальных точек, составляющих тело, и расстояния от этих точек до оси вращения. В итоге формула момента инерции примет следующий вид:
[- М] = I = ∑ri2mi (1.12.1)
Ic = ∫r2dm (1.11.2) - при вращении тела вокруг оси симметрии
где I - общепринятое обозначение момента инерции, Ic - обозначение осевого момента инерции тела, кг/м2. Для однородного тела, имеющего одинаковую плотность ρ по всему объему тела V формулу осевого момента инерции тела можно записать так:
Ic = ∫ρr2dV (1.13)
Таким образом момент инерции является мерой инертности тела при вращательном движении, подобно тому как масса является мерой инертности тела при поступательном прямолинейном движении.
Все круг замкнулся. И тут может возникнуть вопрос, какое отношение все эти законы динамики и кинематики имеют к расчету статических строительных конструкций? Оказывается, что ни на есть самое прямое и непосредственное. Во-первых потому, что все эти формулы выводились физиками и математиками в те далекие времена, когда таких дисциплин, как "Теоретическая механика" или "Теория сопротивления материалов" попросту не существовало. А во-вторых потому, что весь расчет строительных конструкций и построен на основе указанных законов и формулировок и пока ни кем не опровергнутом утвержении о равенстве гравитационной и инертой масс. Вот только в теории сопротивления материалов все еще проще, как ни парадоксально это звучит.
А проще потому, что при решении определенных задач может рассматриваться не все тело, а только его поперечное сечение, а при необходимости несколько поперечных сечений. Но в этих сечениях действуют такие же физические силы, правда имеющие несколько иную природу. Таким образом, если рассматривать некое тело, длина которого постоянна, а само тело является однородным, то если не учитывать постоянные параметры - длину и плотность (l = const, ρ = const) - мы получим модель поперечного сечения. Для такого поперечного сечения с математической точки зрения будет справедливым уравнение:
Iр = ∫r2dF (2.1) → (1.1)
где Ip - полярный момент инерции поперечного сечения, м4. В итоге мы получили формулу, с которой начинали (а вот стало ли понятнее, что такое момент инерции сечения, не знаю).
Так как в теории сопротивления материалов часто рассматриваются прямоугольные сечения, да и прямоугольная система координат более удобна, то при решении задач обычно рассматриваются два осевых момента инерции поперечного сечения:
Iz = ∫y2dF (2.2.1)
Iy = ∫z2dF (2.2.2)
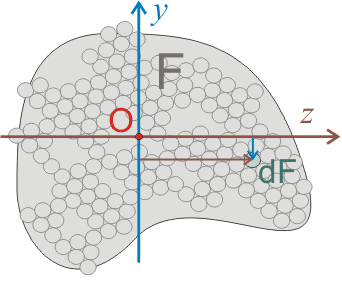
Рисунок 1. Значения координат при определении осевых моментов инерции.
Тут может возникнуть вопрос, почему использованы оси z и у, а не более привычные х и у? Так уж сложилось, что определение усилий в поперечном сечении и подбор сечения, выдерживающего действующие напряжения, равные приложенным усилиям - две разные задачи. Первую задачу - определение усилий - решает строительная механика, вторую задачу - подбор сечения - теория сопротивления материалов. При этом в строительной механике рассматривается при решении простых задач достаточно часто стержень (для прямолинейных конструкций), имеющий определенную длину l, а высота и ширина сечения не учитываются, при этом считается, что ось х как раз и проходит через центры тяжести всех поперечных сечений и таким образом при построении эпюр (порой достаточно сложных) длина l как раз и откладывается по оси х, а по оси у откладываются значения эпюр.
В то же время теория сопротивления материалов рассматривает именно поперечное сечение, для которого важны ширина и высота, а длина не учитывается. Само собой при решении задач теории сопротивления материалов, также порой достаточно сложных используются все те же привычные оси х и у. Мне такое положение дел кажется не совсем правильным, так как не смотря на разницу, это все же смежные задачи и потому будет более целесообразным использование единых осей для рассчитываемой конструкции.
Значение полярного момента инерции в прямоугольной системе координат будет:
Iр = ∫r2dF = ∫y2dF + ∫z2dF (2.3)
Так как в прямоугольной системе координат радиус - это гипотенуза прямоугольного треугольника, а как известно квадрат гипотенузы равен сумме квадратов катетов. А еще существует понятие центробежного момента инерции поперечного сечения:
Ixz = ∫xzdF (2.4)
Среди осей прямоугольной системы координат, проходящих через центр тяжести поперечного сечения, есть две взаимно-перпендикулярные оси, относительно которых осевые моменты инерции принимают максимальное и минимальное значение, при этом центробежный момент инерции сечения Izy = 0. Такие оси называют главными центральными осями поперечного сечения, а моменты инерции относительно таких осей – главными центральными моментами инерции
Когда в теории сопротивления материалов речь заходит о моментах инерции, то как правило в виду имеются именно главные центральные моменты инерции поперечного сечения. Для квадратных, прямоугольных, круглых сечений главные оси будут совпадать с осями симметрии. Моменты инерции поперечного сечения также называют геометрическими моментами инерции или моментами инерции площади, но суть от этого не изменяется.
В принципе самому определять значения главных центральных моментов инерции для поперечных сечений наиболее распространенных геометрических форм - квадрата, прямоугольника, круга, трубы, треугольника и некоторых других - большой необходимости нет. Такие моменты инерции давно определены и широко известны. А при расчете осевых моментов инерции для сечений сложной геометрической формы справедлива теорема Гюйгенса-Штейнера:
I = Ic + r2F (2.5)
таким образом, если известны площади и центры тяжести простых геометрических фигур, составляющих сложное сечение, то определить значение осевого момента инерции всего сечения не составит труда. А для того, чтобы определить центр тяжести сложного сечения, используются статические моменты поперечного сечения. Более подробно статические моменты рассматриваются в другой статье, здесь лишь добавлю. Физический смысл статического момента следующий: статический момент тела - это сумма моментов для материальных точек, составляющих тело, относительно некоторой точки (полярный статический момент) или относительно оси (осевой статический момент), а так как момент - это произведение силы на плечо (1.9), то и определяется статический момент тела соответственно:
S = ∑M = ∑rimi = ∫rdm (2.6)
и тогда полярный статический момент поперечного сечения будет:
Sр = ∫rdF (2.7)
Как видим, определение статического момента сходно с определением момента инерции. Но есть и принципиальная разница. Статический момент потому и называется статическим, что для тела, на которое действует сила тяжести, статический момент равен нулю относительно центра тяжести. Другими словами такое тело находится в состоянии равновесия, если опора приложена к центру тяжести тела. А согласно первому закону Ньютона такое тело или находится в состоянии покоя или движется с постоянной скоростью, т.е. ускорение = 0. А еще с чисто математической точки зрения статический момент может быть равен нулю по той простой причине, что при определении статического момента необходимо учитывать направление действия момента.
Например относительно осей координат, проходящих через центр тяжести прямоугольника, площади верхней части и нижней части прямоугольника будут положительными так как символизируют силу тяжести, действующую в одном направлении. При этом расстояние от оси до центра тяжести можно рассматривать как положительное (условно: момент от силы тяжести верхней части прямоугольника пытается вращать сечение по часовой стрелке), а до центра тяжести нижней части - как отрицательное (условно: момент от силы тяжести нижней части прямоугольника пытается вращать сечение против часовой стрелки). А так как такие площади численно равны и равны расстояния от центров тяжести верхней части прямоугольника и нижней части прямоугольника, то сумма действующих моментов и составит искомый 0.
Sz = ∫ydF = 0 (2.8)
А еще этот великий ноль позволяет определять опорные реакции строительных конструкций. Если рассматривать строительную конструкцию, к которой приложена например сосредоточенная нагрузка Q в некоторой точке, то такую строительную конструкцию можно рассматривать, как тело с центром тяжести в точке приложения силы, а опорные реакции в этом случае рассматриваются, как силы приложенные в точках опор. Таким образом зная значение сосредоточенной нагрузки Q и расстояния от точки приложения нагрузки до опор строительной конструкции, можно определить опорные реакции.
Например для шарнирно опертой балки на двух опорах значение опорных реакций будет пропорционально расстоянию до точки приложения силы, а сумма реакций опор будет равна приложенной нагрузке. Но как правило при определении опорных реакций поступают еще проще: за центр тяжести принимается одна из опор и тогда сумма моментов от приложенной нагрузки и от остальных опорных реакций все равно равна нулю. В этом случае момент от опорной реакции относительно которой составляется уравнение моментов, равен нулю, так как плечо действия силы = 0, а значит в сумме моментов остаются только две силы: приложенная нагрузка и неизвестная опорная реакция (для статически определимых конструкций).
Таким образом принципиальная разница между статическим моментом и моментом инерции в том, что статический момент характеризует сечение, которое сила тяжести как бы пытается сломать пополам относительно центра тяжести или оси симметрии, а момент инерции характеризует тело, все материальные точки которого перемещаются (или пытаются переместиться в одном направлении). Возможно, более наглядно представить себе эту разницу помогут следующие достаточно условные расчетные схемы для прямоугольного сечения:
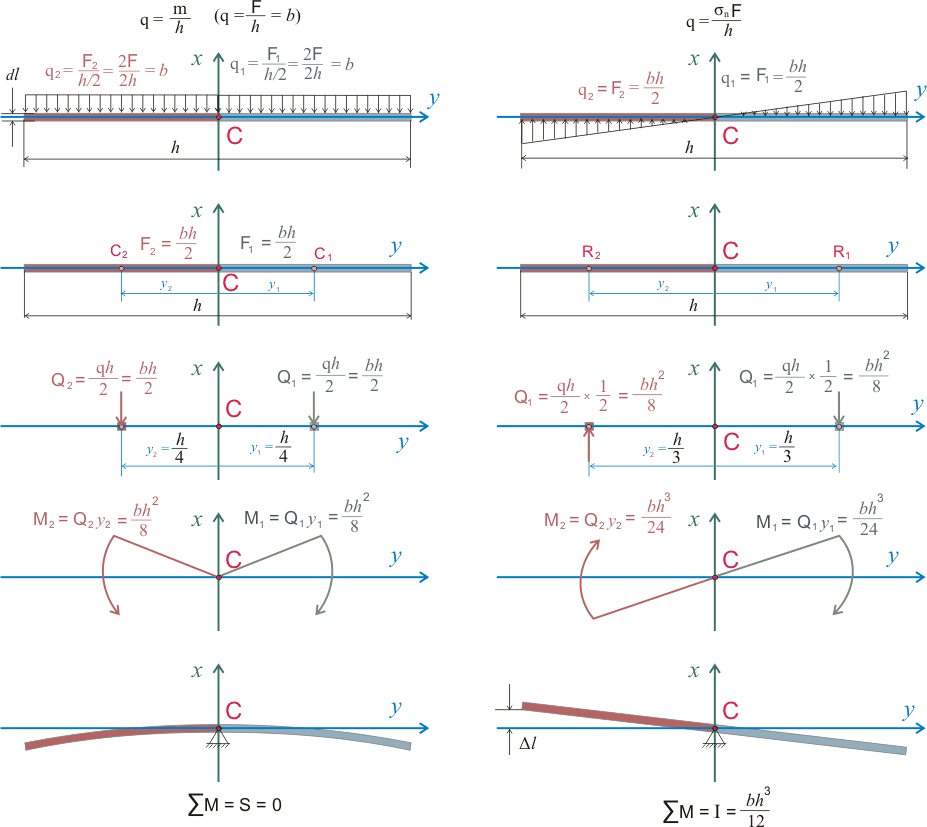
Рисунок 2. Наглядная разница между статическим моментом и моментом инерции.
А теперь вернемся еще раз к кинематике движения. Если проводить аналогии между напряжениями, возникающими в поперечных сечениях строительных конструкций, и различными видами движения, то в центрально растягиваемых и центрально сжатых элементах возникают напряжения равномерные по всей площади сечения. Эти напряжения можно сравнить с действием некоторой силы на тело, при котором тело будет двигаться прямолинейно и поступательно. А самое интересное, это то, что поперечные сечения центрально-растянутых или центрально сжатых элементов действительно движутся, так как действующие напряжения вызывают деформации. И величину таких деформаций можно определить для любого поперечного сечения конструкции. Для этого достаточно знать значение действующих напряжений, длину элемента, площадь сечения и модуль упругости материала, из которого изготовлена конструкция.
У изгибаемых элементов поперечные сечения также не остаются на месте, а перемещаются, при этом перемещение поперечных сечений изгибаемых элементов подобно вращению некоего тела относительно некоторой оси. Как вы уже наверное догадались, момент инерции позволяет определить и угол наклона поперечного сечения и перемещение Δl для крайних точек сечения. Эти крайние точки для прямоугольного сечения находятся на расстоянии, равном половине высоты сечения (почему - достаточно подробно описано в статье "Основы сопромата. Определенение прогиба" ). А это в свою очередь позволяет определить прогиб конструкции.
А еще момент инерции позволяет определить момент сопротивления сечения. Для этого момент инерции нужно просто разделить на расстояние от центра тяжести сечения до наиболее удаленной точки сечения, для прямоугольного сечения на h/2. А так как исследуемые сечения не всегда симметричны, то значение момента сопротивления может быть разным для разных частей сечения.
А началось все с банального яблока... хотя нет, начиналось все со слова. |
11-11-2015: Александр
Классная статья, всё понятно, с рисунками, красота!
10-01-2017: Ринат
В данной статье сказано: Получается, что чем ближе материальные точки тела к оси вращения, тем меньшую силу требуется приложить, чтобы заставить тело вращаться и наоборот, чем дальше материальные точки тела от оси вращения, тем большую силу нужно приложить, чтобы заставить тело вращаться.
Не наоборот ли? Ведь расстояние от оси является плечом. Чем больше плечо, тем меньше силы нужно приложить для того, чтобы заставит тело вращаться. Или я вновь неправильно всё понял. Упс:(
10-01-2017: Доктор Лом
Возможно я недостаточно ясно выразился, поэтому внес в статью соответствующую поправку. В данном случае речь идет о силе, приложенной в одной и той же точке. Например в первом случае, когда материальная точка расположена близко к центру вращения, то необходимая для вращения сила, приложенная на таком же расстоянии, будет одной. Во втором случае плечо приложения силы не изменится, а вот материальная точка будет от центра вращения значительно дальше, поэтому и сила для ее вращения потребуется больше, хотя при этом масса материальных точек в обоих случаях остается одинаковой.
Надеюсь, теперь понятно объяснил.
20-03-2017: игорь
браво !
28-05-2017: Борис
То самое объяснение которое так долго я искал. Лучшее на мой взгляд. Спасибо, стало все гораздо яснее!
28-05-2017: Доктор Лом
Рад был помочь, пусть и виртуально.
15-05-2018: Николай
Здравствуйте!
Вы пишите "соответственно нормальное ускорение аn при вращательном движении равно". На основании чего это соответственно? Для наблюдателя никакого соответствия не видно. Просто в воздухе возникла формула.
15-05-2018: Николай
Я - практикующий инженер-строитель, который, к сожалению, как и большинство выпускников российских вузов не понимает физических смыслов многих применяемых формул и значений, с которыми работает каждый день. И вот в чем проблема - из сопромата и строймеха сделали не прикладную науку времен Гука и Эйлера, а тысячи непонятных закорючек и математических функций. Современная российская высшая школа совершенно забыла, что все великие открытия были сделаны и потом записаны в виде формул не с помощью писанины и символов, а на реальных работающих моделях. Все те знания, которые я знаю "на пять", я получил не из учебников и статей подобных вашим (пусть ваши статьи - одни из самых лучших), а с помощью проб и ошибок на реальной стройке. Поработав с шарнирно-стержневыми системами на реальных примерах (деревянные конструкции), начинаешь понимать, что написано в формулах. Так же ОЧЕНЬ сильно помогают лекции западных университетов на ютубе, в которых лекторы показывают описываемые закорючками законы и многие вещи становятся очевидными сразу. Мне 31 год и мое время КРАЙНЕ небезгранично. Уже нет годов на воспринятие материала через представление чего-то в голове, но без чего не вырасти в профессиональном плане. Нужны видеоуроки лабораторных занятий. Каждая написанная вами формула легко демонстрируется в натуре на тех или иных предметах и моделях. Желаю вам, мне и коллегам-инженерам-строителям, чтобы такие уроки появлялись и в России. Тогда образованность станет не исключением, а нормой времени.
15-05-2018: Доктор Лом
Действительно, далеко не все формулы, приведенные в данной статье, следуют одна из другой. Но такой задачи и не было. Эти формулы есть в учебниках физики и там следует искать пошаговый их вывод. Я же просто пытался показать, что момент инерции - это не некая абстрактная величина, придуманная основателями сопромата (когда я учился, я ее примерно так и воспринимал), а вполне согласующаяся с общими физическими законами и понятиями, только и всего.
10-01-2019: Дмитрий
Момент инерции - есть первообразная от момента сопротивления. А что же такое момент сопротивления? А это производная от момента инерции:)
Отличная статья. Замечательно показывает материальность понятия "момент инерции". Пример с "балками-качельками" отличный!
10-01-2019: Доктор Лом
Дмитрий, искренне рад, что статья вам понравилась.
10-01-2019: Дмитрий
Уважаемый Доктор, а Вы не думали выпустить свои труды в печатном виде?
10-01-2019: Доктор Лом
Не думаю, что это будет иметь успех. К тому же труд еще не завершен, многие аспекты теории сопротивления материалов еще не нашли отражения в моих статьях (и теперь вряд ли найдут, так как сил и желания на продолжение работы у меня уже нет).
22-05-2019: Диана
Физический смысл осевого момента инерции ???ответье пожалуйста
22-05-2019: Доктор Лом
Да я вроде целую статью посвятил объяснению осевых моментов инерции и добавить мне тут особенно нечего. Пожалуйста, перечитайте данную статью более внимательно и физический смысл вам откроется. Если нет, то обращайтесь.
25-08-2019: Андрей
Здравствуйте! Вы пишете - "При постоянной угловой скорости вращения, например w = 1" - здесь не могу разобраться, разве мы имеем право вот так выбросить величину из формулы? Ведь если постоянная угловая скорость вращения будет 0,9 (допустим град/сек), она всё равно будет постоянной? Так ведь можно и массу принять равной 1кг и выбросить из формулы...
Интуитивно я понимаю что формула m(r^2) единственно верная, но куда девать угловую скортсть если она не равна 1с-1?
Подскажите, где я ошибаюсь?
25-08-2019: Доктор Лом
Тут такое дело, если вы посмотрите на окончательную формулу, то там вообще остались только сантиметры (или метры) в четвертой степени. Никаких килограммов или секунд. Все потому, что момент инерции - это одна из геометрических характеристик рассматриваемого поперечного сечения. Т.е. при неких постоянных значениях угловой скорости и массы на значение момента инерции влияют только расстояния от рассматриваемых точек до центра вращения. Другими словами, когда мы переходим от физических понятий вращающего момента и его реакции - момента инерции к моменту инерции - геометрической характеристике сечения, то значение угловой скорости, присутствующее в обеих частях уравнения, взаимно сокращается.
Во всяком случае я это так понимаю, никаких вразумительных статей на эту тему мне читать не приходилось. А вообще данная статья - не более чем попытка примерно пояснить смысл понятия - момент инерции, не более того.
06-10-2020: борис
на мой взгляд статья мутная ,ничего не проясняет а только делаются попытки.В лекциях недопустимо применять неясные термины..
06-10-2020: Доктор Лом
Это не лекции, а как раз попытка понять, откуда берутся те или иные понятия или термины. Когда я изучал сопромат, то все ограничивалось формулировкой, приведенной в начале статьи. Многим такое заходит на ура, так как позволяет избежать мыслительного процесса и сразу переключиться на запоминание. Да и вообще для любителей классического изложения сопромата есть учебники. Зачем им читать мои статьи?
Ну а то, что вам статья не понравилась - это нормально. Я не Пушкин, не Шекспир и не профессор гарвардского университета. Это при том, что даже вышеперечисленных персонажей современные пользователи инета ругают не па-децки.
15-02-2022: Владислав
Закончил строительный ВУЗ с красным дипломом. Сопромат и строймех давался легко, но легко, как бы не вникая в физ. суть. Расчет любых конструкций делаю, на любую силовую конструкцию посмотрю и уже эпюры попереч. силы и моментов в уме представляю. Но так и не понимаю физическую суть момента инерции, а ещё - как вам может странно показаться - не могу до сих пор понять физ. суть поперечной силы.
Не понял я это и из ваших лекций.
|